建築構造幾何学(担当:舘知宏准教授) 最終成果物
イモムシのように歩行する折り紙ロボットを考案した。
柔らかい素材でOrigami tube (Tachi, 2009) を作成し片端近くの一箇所の折り角度のみを制御することで波のように動き歩行する機構を実現できることが分かった。
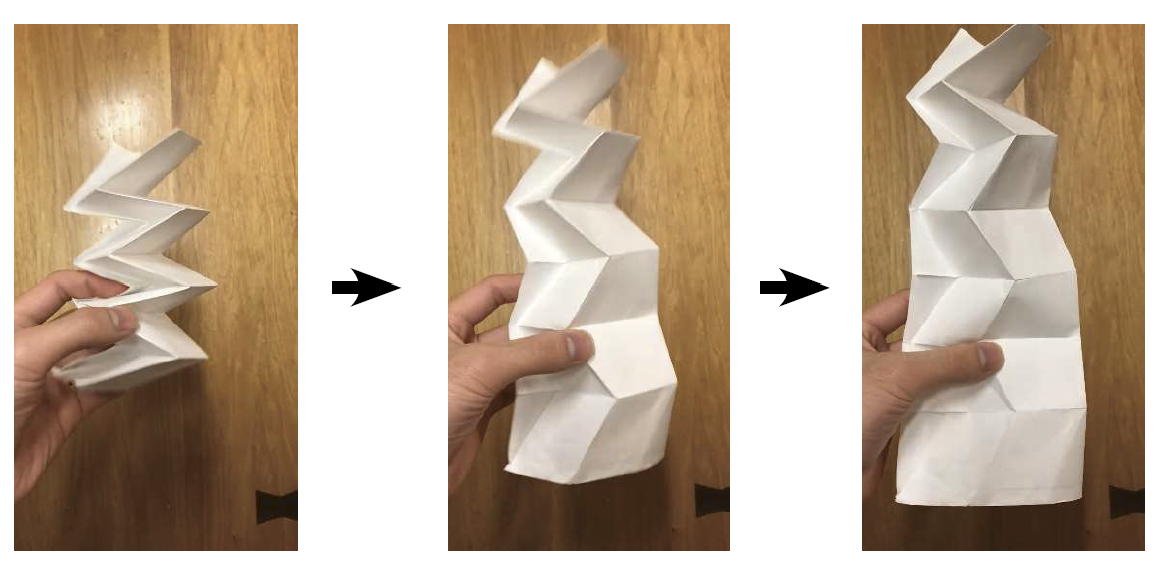
イモムシやミミズは、体を波打たせるようにして進む。そこで今回は、波のように動く折り紙機構を探求した。
注目したのは、柔らかい紙で作った折り紙チューブである。この機構は片端だけを動かすと、一自由度にも関わらずまるで波のように動く。
注目したのは、柔らかい紙で作った折り紙チューブである。この機構は片端だけを動かすと、一自由度にも関わらずまるで波のように動く。
剛性の高い材料の場合は片端を展開すると全体が連動して展開する。一方非常に柔らかい材料の場合は面内外の変形を許容できるため片端を展開しても他の部分が連動しない場合がある。これらの間の適度に剛性を持った材料を使うと、展開や収縮の挙動がだんだんと伝わる波のような動きが実現される。
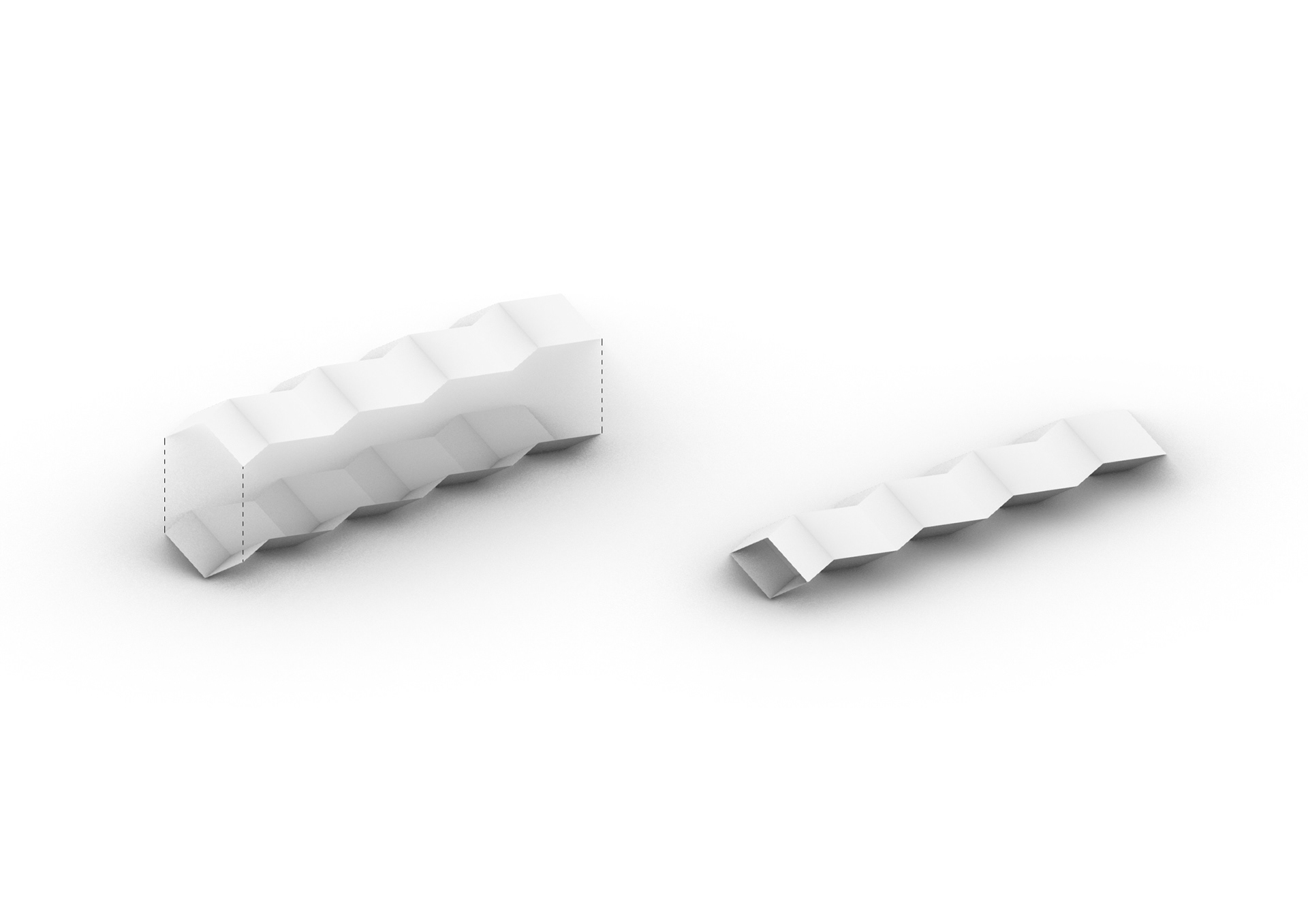
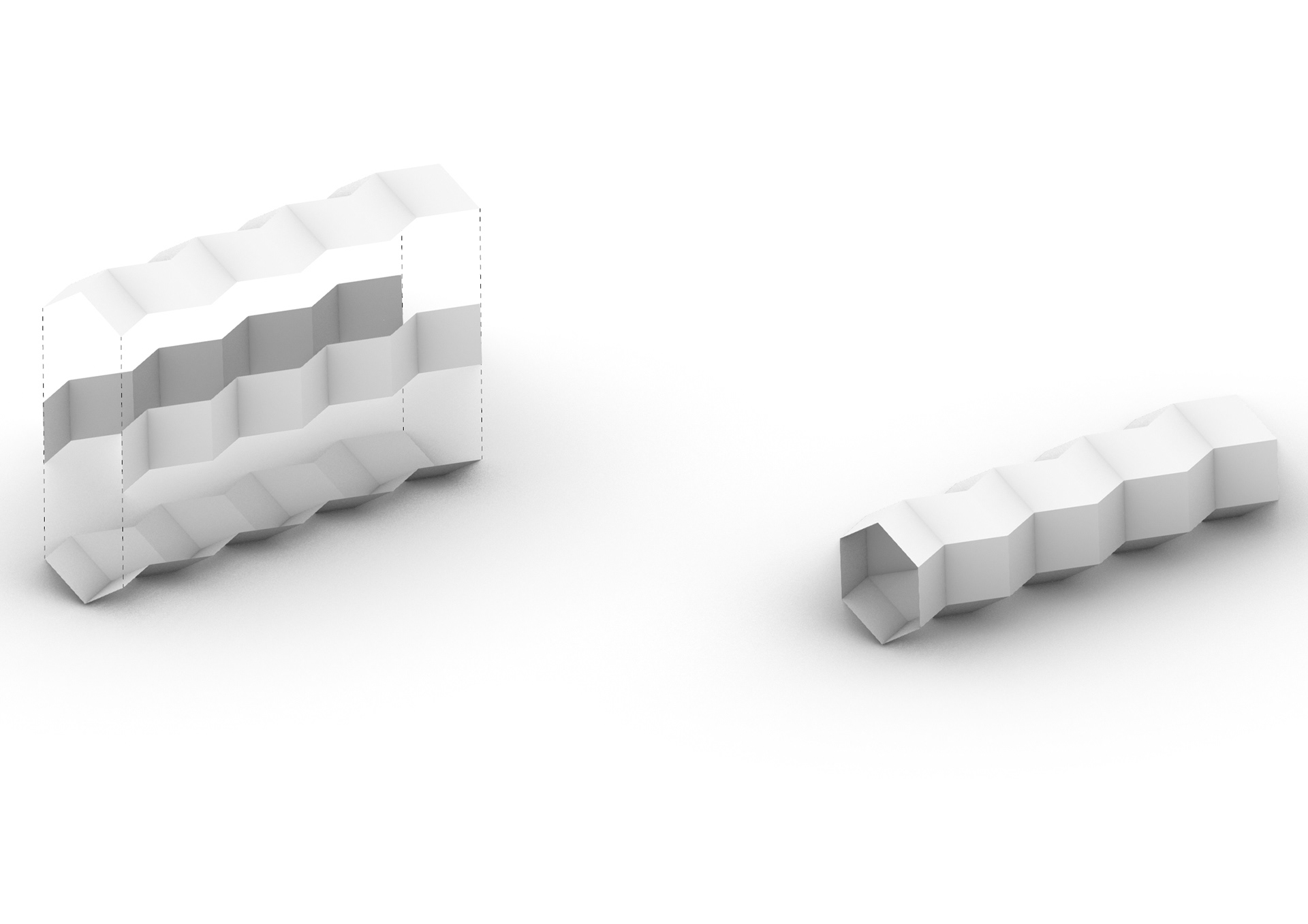
今回は、断面形状がひし形のものと六角形のもの、計2種類の折り紙チューブを用いて検討を行った。
GrasshopperのPlug-in、Kangarooを用いてシミュレーションを行い、動きを分析した。
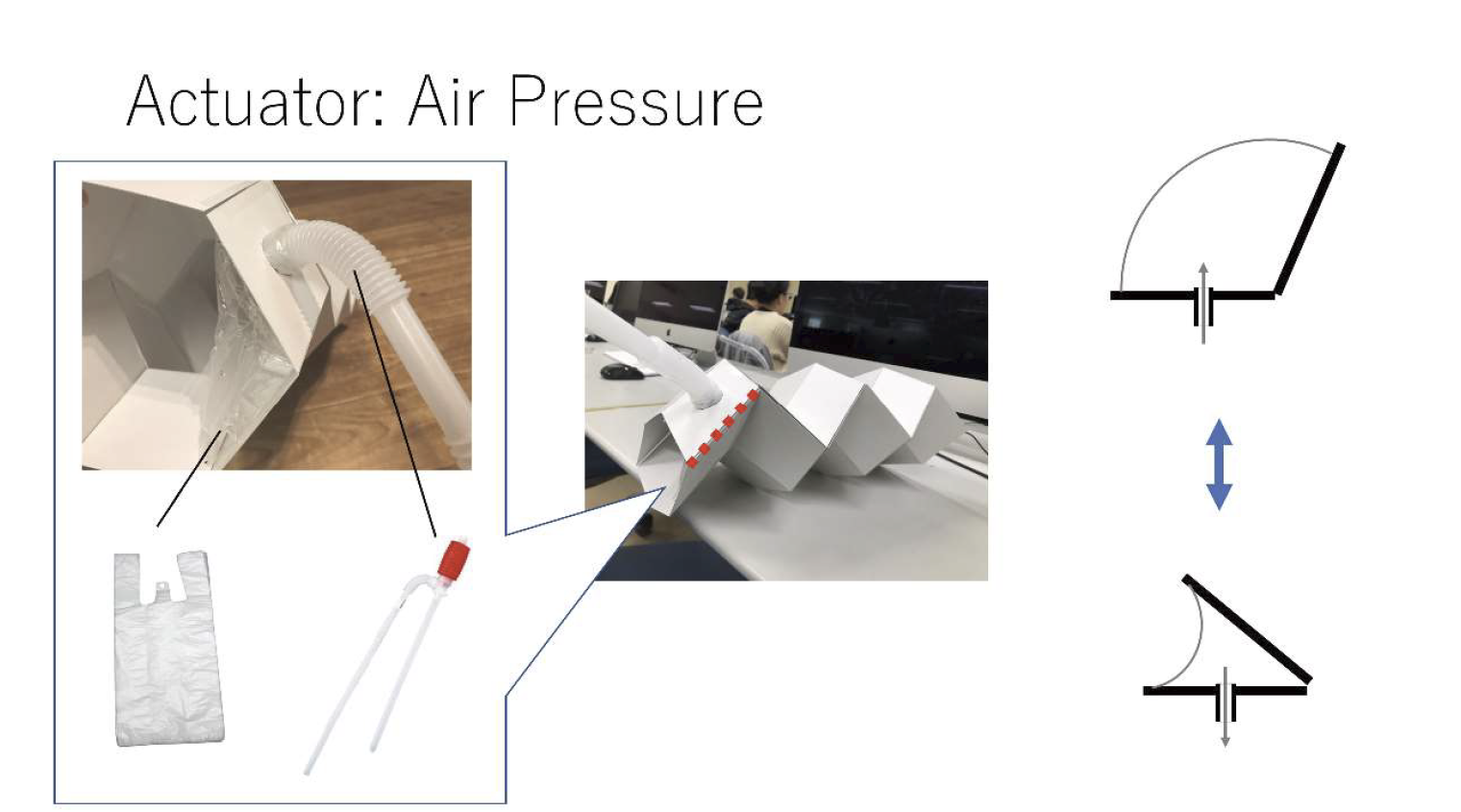
面に厚紙、折線にセロハンテープを用いて模型を作成した。
アクチュエータは灯油ポンプとビニール袋を用いて、息を吹き込むことにより動くものを作成した。